Erro Periódico e NEQ6 - Convivemos e pouco conhecemos !


|
|
Esta mensagem foi atualizada em .
Este artigo foi produzido baseado na experiência e coleta de informações na internet e na suite EQMOD - PECPREP.
Certamente que não é preciso, completo e possivelmente contém vários erros de entendimento. Nada diferente do que tenho lido. Erro periódico em uma montagem equatorial é uma ocorrência normal, e sua intensidade varia conforme a qualidade da fabricação das peças mecânicas desta montagem. Se caracteriza por aceleração e desaceleração ao longo de um ciclo completo do sistema de movimentação. E tem origem em praticamente todas as suas partes. Sendo a principal localizada entre o eixo sem fim e a coroa que movimenta o tubo OTA. Todos falam, convivem, mas pouquíssimas pessoas entendem e sabem como intervir para melhorá-lo. Na verdade eu diria até que poucos sabem analisá-lo e medi-lo. Sem falar na interpretação dos gráficos que alguns programas geram. E é confuso mesmo ! E talvez seja por isso que ninguém posta em fóruns análise do erro periódico de suas montagens. Quando falam, dizem que está tudo bem. Com ótima performance. Mas não publicam nenhum gráfico ou arquivo. Ou simplesmente reduzem a questão ao excesso de peso de equipamentos. Chegando a sugerir que só se deve utilizar 50 % da carga máxima. Para uma NEQ6 de 20 kg, seria 10 kg... ou melhor 5 kg, pois os outros cinco são dos contrapesos ... ou melhor 4 kg, pois há o peso da câmera, roda de filtros, barlows e etc. Desta forma uma NEQ6 só teria boa performance se suportasse ... um binóculo .... e dos pequenos ! Como minha montagem NEQ6 vinha apresentando aumento de erro de backslash em DEC, que seria a reversão de um movimento norte para sul ou vice-versa, resolvi, mais uma vez, efetuar nova lubrificação e ajustes de todas as peças envolvidas. E aproveitei o fiz também para a movimentação de RA. A montagem NEQ6, como todas as demais, permitem ajustes de 3 pontos. A folga entre o eixo sem fim e coroa, a folga entre o pinhão do motor de passo e sua engrenagem redutora, e a folga entre estes dois conjuntos. Entretanto isto pode ser insuficiente, pois o erro mais grave se encontra justamente na incompatibilidade no fator de relação entre estas peças e na própria usinagem das peças. Tipo engrenagem com passos entre os dentes diferentes, engrenagens ovais e não circulares, passos da rosca do sem fim irregular e etc. Portanto, fica acertado uma verdade: não há erro periódico de valor zero. Mesmo que você ajuste absolutamente perfeito o que lhe é permitido ajustar: as folgas entre as peças. Este artigo não se dispõe a ensinar como desmontar, ajustar e montar a NEQ6. Minha proposta é apenas avaliar uma experiência de ajuste e suas consequências. E ajudar a entender um pouco os gráficos gerados pelos programas dedicados a esta tarefa. Para simplificar, um ajuste muito apertado das folgas ocasionará um sobre esforço ao sistema e será bem evidente com os ruídos estranhos gerados pelo sistema mecânico e elétrico-eletrônico. Podendo inclusive bloquear qualquer movimento. Um ajuste muito solto, também gerará estranhos ruídos de vibração, no início e final de movimentos. Além de ser percebido pelo vai e vem dos eixos de DEC e RA quando forçados com as mãos. Executado esta tarefa que é simples, embora às vezes muito chata e demorada devido a forma como as peças são montadas no interior do equipamento, o passo a seguir é verificar a performance medindo o erro periódico resultante. Há programas que o fazem, gerando arquivos textos com os valores medidos de drift de RA e DEC. Entre eles eu uso o EqAling e o PeRecord-PecPrep-EQMOD. Este último é bem mais completo na análise das informações gravadas. E será o gráfico dele que usarei neste artigo. Estes programas usam de matemática para gerar o gráfico, com cálculos de Fourrier e etc. E no caso do PecPrep fornece análise de vários fatores. Entre eles do erro periódico e das frequências, indicando quem seria os principais geradores deste erro. E por causa do uso da matemática de Fourrier, muitas informações se referem a ruídos, vibrações que participam com muito pouca intensidade na composição final do erro periódico. A primeira dificuldade vem com a tradução dos termos técnicos de mecânica. E aqui pode estar a primeira falha deste artigo. Mas por intuição acabei definindo: worm drive - eixo sem fim transfer gear - engrenagens de transferência de movimento do eixo sem fim e coroa (tenho dúvida se é somente deste sistema ou se é referencia para todas as engrenagens, excetuando a do motor de passo. stepper gear - engrenagens do motor passo a passo gear mesh period - periodo do conjunto de engrenagens (não pergunte, pois não saberia dizer o que vem a ser) worm bearing ball - rolamentos do eixo sem fim (tenho dúvida se é somente deste sistema ou se é referencia para todos os rolamentos do conjunto) Para o meu teste e análise utilizei duas posições do OTA. Uma visando Canopus no Meridiano, quando o OTA fica bem deitado com o contrapeso quase na horizontal. A outra visando Achenar, no Horizonte, quando o OTA fica bem virado para Oeste, mas o contrapeso fica quase que na posição vertical. Pelo menos aqui na minha latitude e longitude. Vejamos as mensurações e gráficos para Canopus: Gráfico da curva de PE registrado, filtrado pra redução de ruídos e alinhado no eixo abcissa, ignorando visualmente drift de DEC 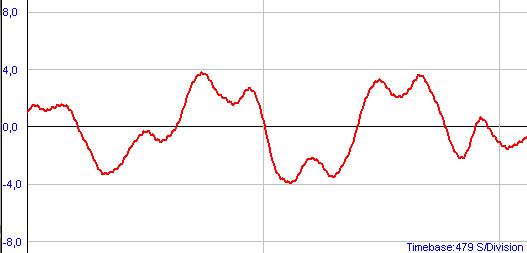 Primeira observação: ela não tem forma repetitiva, apresentando alteração de intensidade e fase. No final deste artigo há um comentário específico sobre este problema. Agora vejamos os gráfico de frequência: 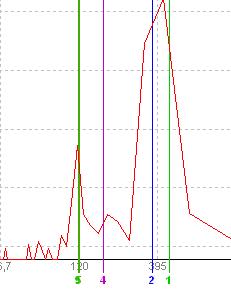 Pela análise do gráfico de frequência podemos deduzir que o erro periódico teria origem principal em: 1) conjunto eixo sem fim e coroa (linhas marcadores números 1 e 2) 2) engrenagem do motor passo a passo (linha marcadora número 5) 3) rolamentos do sem fim (linha marcadora número 4) Embora não representado na imagem, não houve valores significativos para harmônicos impares, o que significaria que não há restrição de movimentos por excesso de ajuste ou aproximação das engrenagens e motores. Há coincidência de valores entre 4o. harmonico e engrenagem do motor passo a passo - linha maradora número 5. Segundo a documentação do EQMOD isto seria normal, se o sem fim (worm) tem um valor alto.
E agora a estatísticas do Erro Periódico: 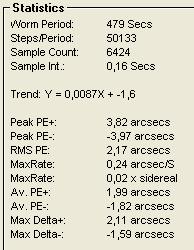 O valor pico a pico do erro seria de 7,79 arcosegundos - com 3,82 e -3,97 arcosegundos Há um constante deslocamento leste de 0,0087 arcosegundo por segundo registrado sob a tag Trend Agora vejamos a curva para Achernar: 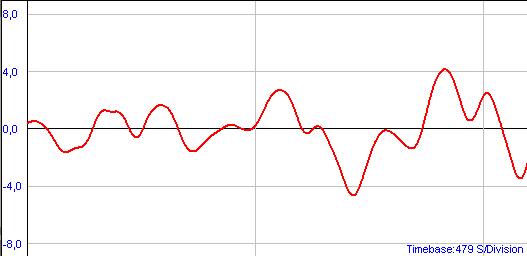 A fequência: 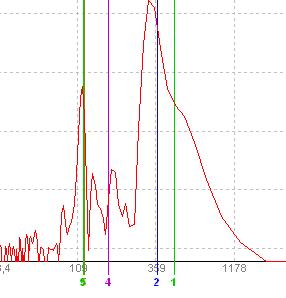 Nesta posição observamos que também não há valores significativos para harmonicos ímpares. E verificamos que a origem do erro seria devido a: 1) conjunto eixo sem fim e coroa (1 e 2) 2) engrenagem do motor passo a passo (5) 2) rolamentos - mais de um, parece (4) Há coincidencia de valores entre 4o. harmonico e engrenagem do motor passo a passo.  E a estatística: 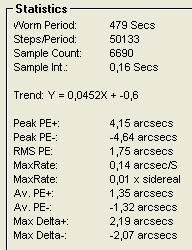 O valor pico a pico do erro seria de 8,79 arcosegundos - com 4,15 e -4,64 arcosegundos Há um constante deslocamento leste de 0,0452 arcosegundo por segundo - tag Trend Aproveitando de antigos arquivos do ano de 2012, vamos fazer uma rápida comparação. Em 20 de janeiro de 2012 temos que: 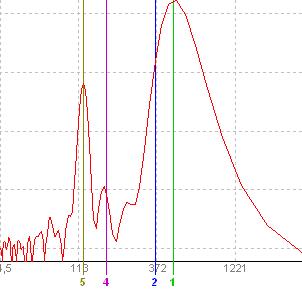 1) as origens do erro estariam nas mesmas fontes. 2) Há coincidência de valores entre 4o. harmônico e engrenagem do motor passo a passo. 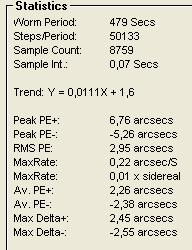 O valor pico a pico do erro seria de 10,02 arcosegundos - com 6,76 e -5,26 arcosegundos Há um constante deslocamento leste de 0,0111 arcosegundo por segundo O mesmo para um arquivo de 17 de junho de 2012, sendo que o erro PE anotado foi bem maior: 20,26 arcosegndos pico a pico. Outros arquivos que só tomaram um ciclo de amostragem também mostram este alto valor para posição de azimute e valores menores para outra posição (não há anotação de qual) em torno de 9 a 10 arcosegundos. E todos com a indicação de deslocamento contínuo para leste. Adendo: Foi experimentado redução da velocidade sideral pelo EQMOD para lidar com o constante deslocamento leste. 1) para posição achernar-horizonte houve redução de 0,0452 para 0,0097 arcosegundos por segundo 2) para posição canopus-meridiano houve redução de 0,0087 para 0,0005 arcosegundos por segundo Entretanto foi observado que esta alteração de velocidade indicava necessidade de correção do alinhamento do polo sul. Conclusão:Para movimento de RA:a) há um pequeno indício de melhora no Erro Periódico no valor de 1 a 3 arcosegundo entre as mensurações de agora e de 2012. Desconsiderando as mensurações de valores muito altos em 2012, tipo 20 arcosegundos. Pelo garimpado na internet a NEQ6 deveria ter um PE de até 9 arcosegundos. b) não há indicio de esmagamento nos ajustes de posição do motor e engrenagem. c) desconheço a causa e influência do 4o. harmonico com relação ao motor de passo d) confirma a impressão anteriormente notada de que a Velocidade da NEQ6 deveria ser reduzida de 15,041067 para 14,990000 aproximadamente. Para movimento de DEC:Antes o tempo de backslash aparentava estar em torno de 4 a 6 segundos, e não houve grandes reduções. Provavelmente está agora em torno de 3 a 4 segundos. Talvez até um pouco menos. É difícil esta mensuração. É mandar reverter o movimento e contar tempo até ver a estrela se movendo. Esta percepção se dá quando na calibração do PHD, quando a movimentação de DEC não retorna para o ponto de origem. Embora no PHD temos em torno de 10 a 12 pulsos da ordem 80 a 150 milisegundos. Tenho memória de que no início de uso da minha montagem este retorno acontecia. E no guiamento se percebe que é necessário de 4 a 8 comandos para que haja uma reação de retorno da estrela que estaria fugindo. E neste período se percebe que há um aumento desta fuga, como se as engrenagens ficassem livres de qualquer tipo de contato entre si. nota: Informei anteriormente que haveria uma referencia a forma não repetitiva da curva de PE. Pois bem, eis o que colhi do manual do PecPrep: Tradução livre: Esta aparentemente complexa forma é causada pela interação devida de 3 fontes de erros, o sem fim, a engrenagem de transferência e engrenagem do motor de passo. A variação entre os ciclos é devido ao fato de que a coroa ou o motor de passo tem rotação que não são harmônicos com o sem fim. Em português claro, com referência a minha (e de outros) montagem: Tá tudo errado ! Tipo: o sem fim é para uma montagem, o motor de passo é pra outra, a coroa é de outra e aí vai. Ou talvez, seja melhor dizer: não há nenhum padrão de qualidade nas peças produzidas para a NEQ6. Cada uma sai de uma forma diferente. Com isto é até possível ter uma NEQ6 decente... mas por mero acaso da sorte ! Ainda bem que existe guiagem... mesmo com uma NEQ6 frankstein.... a gente mantém ela na linha !
GSO 305 mm
NEQ6 Pro - Roda 5 Filtros Manual Guia: OAG TSOAG9T2 - ASI120MC Cannon EOS T3 - QHY163M ASI120MC, DSI-1 Meade e SPC880 |
||||
«
Retornar para Guiamento & Afins
|
1 visualização|%1 visualizações
| Free forum by Nabble | Nabble® |